Faire pivoter le Mbot
I ) Fonctionnement attendu :

Suite à un appui sur le bouton poussoir de la carte du robot et après une temporisation de 3 secondes celui-ci devra pivoter sur lui-même d'un angle de 90° sur la droite ( sens horaire ) puis stopper.
II ) Commandes à utiliser :
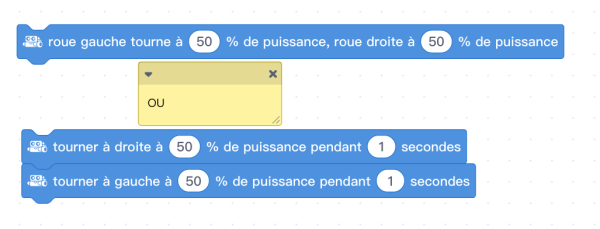
Nous utiliserons une des deux fonctions pour piloter les roues droite et gauche de manière indépendante afin de pouvoir exécuter le mouvement pivot par rapport à l'axe au milieu de l'axe des roues du robot

Pour introduire une temporisation :
Remarque :
NB : Une valeur négative de la puissance fera tourner le moteur en sens inverse ( exemple : -200 )
III ) Le programme principal et le sous programme :
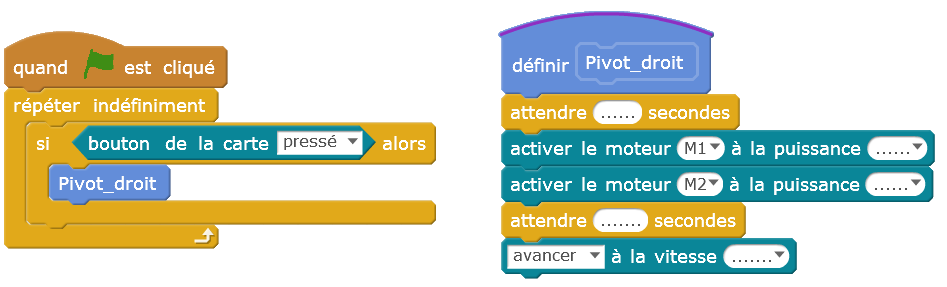
Mblock met à disposition du programmeur une instruction qui permet De créer des blocs supplémentaires qui s'apparente à des sous programme les instructions sur l'image jointe représente un exemple il a été réalisé avec une version antérieure de bloc mais le principe reste le même.
Remarque :
“Pivot_droit” est un sous programme que vous devez créer dans “Blocs & variables” ( créer un bloc )
IV ) Quels sont les paramètres sur lesquels nous pouvons agir ?
P1 : La puissance des moteurs ( variable de 0 à 255 )
Pour un bon fonctionnement la puissance des moteurs ne doit pas être inférieure à 100
Par ailleurs, trop de puissance rendrait la mise au point délicate.
conclusion : pour votre expérimentation la puissance sera constante et égale à 150 ( ou -150)
P2 : Le temps d'action des moteurs (variable exprimé en seconde )
Pour votre première essai, vous fixerez cette valeur à 1 seconde
V ) Test et mise au point du programme
Téléchargez le fichier, enregistrez le dans votre dossier de travail, et imprimer le.
Connectez votre robot en suivant la procédure de connexion
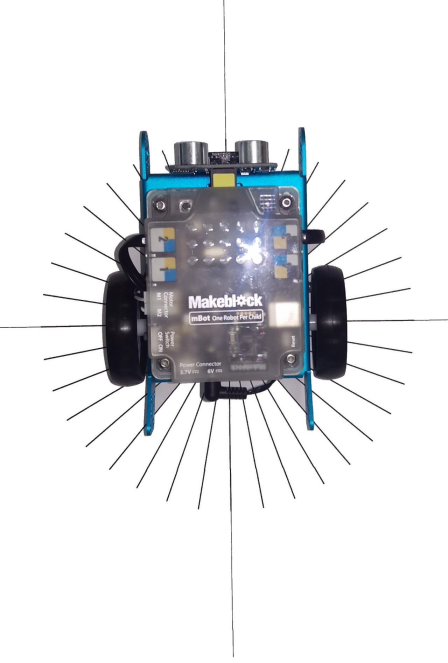
Placez votre robot sur la feuille de format A4 fournie à cet effet par le professeur
( feuille graduée tous les 10° )
Procédez par essais successifs en modifiant la valeur de la temporisation dans votre programme
Créer un fichier tableur nomé PIVOT--classe-ilot-prenom au format libreoffice calc, ce compte rendu doit comporter à l'intérieur :
nom prénom.
un tableau comme ci-dessous
Complétez la fiche de compte rendu.
les calculs avec une formule dans le tableur
Essais | Temporisation de départ ( en seconde ) | Puissance moteur M1 ( moteur gauche ) | Puissance moteur M2 ( moteur droit ) | Temps de fonctionnement des moteurs ( en seconde ) | Angle obtenu | Observations |
1 | ||||||
2 | ||||||
3 | ||||||
4 | ||||||
5 | ||||||
Méthode : Par le calcul.
PRODUIT EN CROIX avec les deux variables connues la position en degré et le temps mis pour parcourir
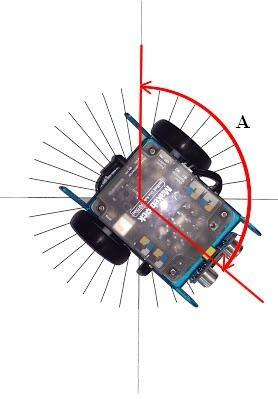
Etape 1 relever la valeur A
A deg <--> 1s
90 deg <--> Y s
Etape 2 calculer Y
Etape 3 tester dans le programme.