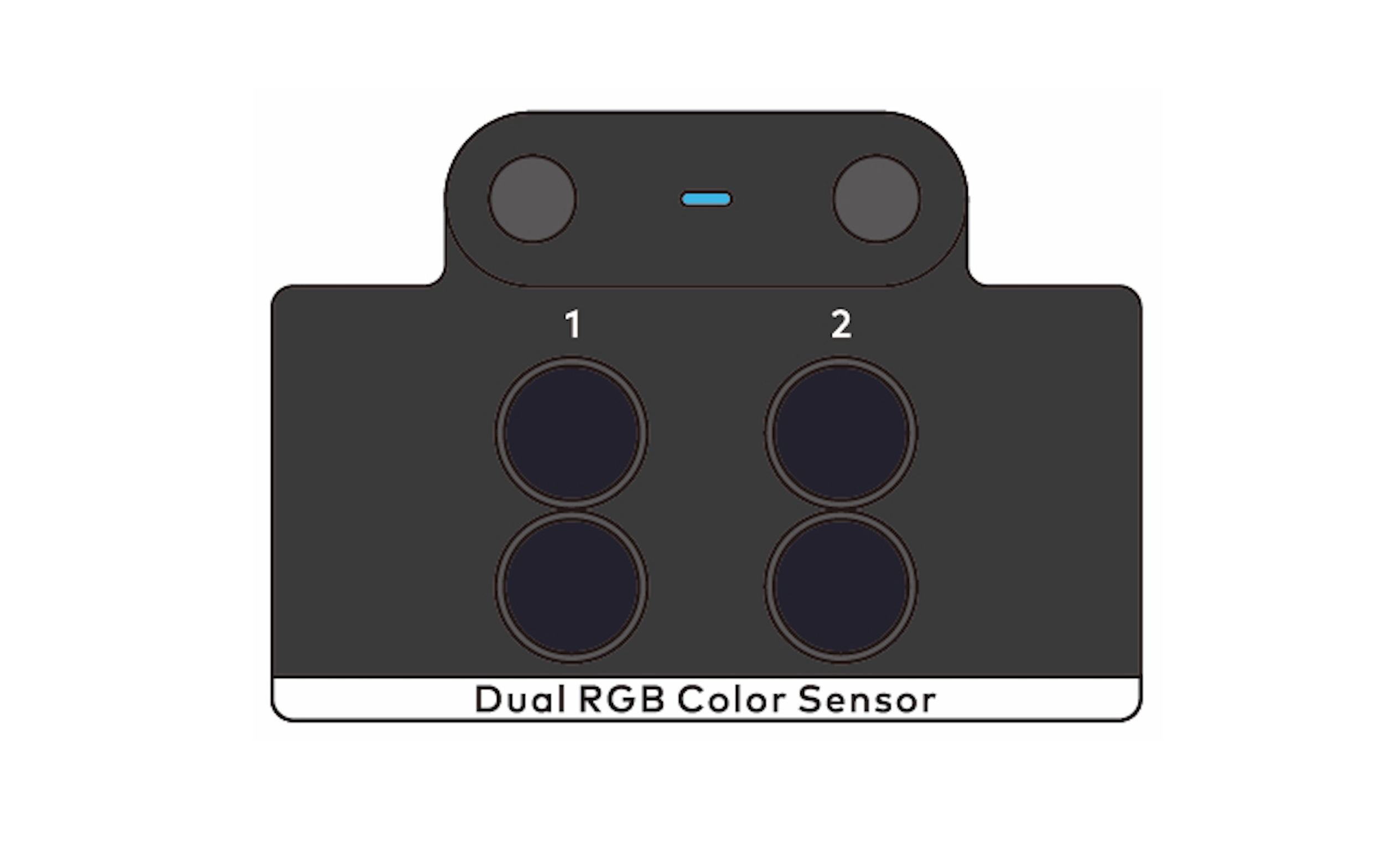
Capteur de couleur RGB double
Le capteur de couleur RGB double se compose d'une paire d'éléments sensibles à la lumière pour détecter la couleur d'un objet. Il peut faciliter le suivi de ligne des robots tout en détectant les couleurs.
Le capteur de couleur RGB double peut fournir plusieurs types de données, y compris la sortie analogique qui indique l'intensité lumineuse, la sortie numérique qui indique les états de la ligne et de l'arrière-plan, et les valeurs de paramètres calculées pour le contrôle moteur, ce qui garantit une flexibilité suffisante tout en simplifiant votre processus d'application. Sur la base de la sortie des données, les enseignants peuvent expliquer les connaissances et les principes de fonctionnement sous différents aspects.
Le capteur de couleur RGB double fournit la fonction d'apprentissage de carte adaptative. Il définit automatiquement les seuils après avoir appris les couleurs de l'arrière-plan et de la ligne à suivre. Le micrologiciel du capteur comprend un algorithme de suivi de ligne et peut fournir directement des valeurs de paramètres pour contrôler la vitesse de rotation des moteurs, ce qui rend le suivi de ligne à haute vitesse plus facile.
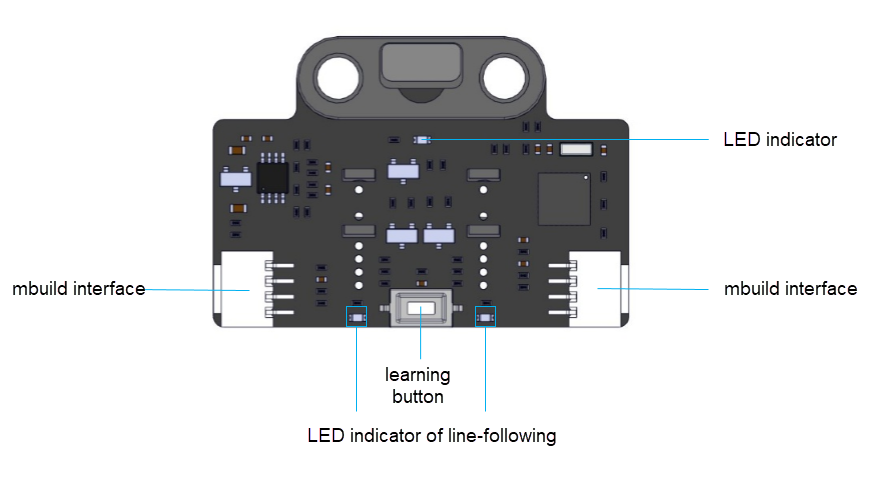
Description des boutons
-
Appui simple : Aucune fonction n'est définie.
-
Double pression : Lorsque le bouton est pressé deux fois, le capteur de couleur RGB double commence à apprendre l'arrière-plan et la ligne pour le suivi de ligne.
Placez les capteurs de lumière sur l'arrière-plan de la carte de suivi de ligne et appuyez deux fois sur le bouton. Lorsque vous voyez les LED indiquant que l'état de suivi de ligne clignote rapidement, balayez les capteurs de côté à côté au-dessus de l'arrière-plan et de la ligne jusqu'à ce que les LED arrêtent de clignoter. Cela prend environ 2,5 secondes. Les valeurs de paramètres obtenues sont automatiquement stockées. Si l'apprentissage échoue, les LED clignotent lentement, et vous devez recommencer l'apprentissage.
- Appui long : Lorsque le bouton est maintenu enfoncé pendant deux à trois secondes, le capteur de couleur RGB double change la couleur des lumières de remplissage dans l'ordre du rouge, du vert et du bleu. En général, vous n'avez pas besoin de changer la couleur. La couleur est définie automatiquement après la fin de l'apprentissage.
Principe de fonctionnement
Chaque groupe de capteurs de couleur se compose d'un capteur de lumière et d'une LED RGB. Dans le monde réel, lorsque vous voyez un objet en rouge, cela signifie que l'objet absorbe plus de lumière que la lumière rouge. Par conséquent, si vous utilisez une lumière de remplissage pour éclairer un objet avec de la lumière rouge, plus l'objet est rouge, plus il réfléchit de lumière, et plus grande est la valeur de sortie du capteur de lumière. De cette manière, vous pouvez obtenir l'intensité rouge de l'objet. De même, vous pouvez changer la couleur des lumières de remplissage pour obtenir l'intensité verte et bleue de l'objet et ainsi déterminer la couleur de l'objet.
Interférences environnementales et erreurs de détection
Dans le monde physique, vous pouvez trouver des interférences environnementales et des erreurs de détection presque partout. Si un capteur de couleur doit déterminer la couleur d'un objet en fonction de l'intensité de la lumière (éclairée par une lumière de remplissage et réfléchie par l'objet) qu'il détecte, des erreurs de détection peuvent être causées car la lumière ambiante est également détectée.
Faites attention aux erreurs de détection. Lorsque vous utilisez deux capteurs de couleur RGB double pour détecter la couleur d'un objet dans le même environnement, les résultats de détection peuvent être différents. Mais en général, la différence est faible.
En pratique, les ingénieurs utilisent des algorithmes ou une conception spéciale pour éviter les interférences environnementales et les erreurs de détection. Par exemple, vous pouvez utiliser une impression 3D pour bloquer la lumière ambiante afin qu'elle n'atteigne pas l'objet à détecter et le capteur de couleur RGB double; alternativement, vous pouvez utiliser un algorithme : enregistrer l'intensité de la lumière ambiante lorsque les lumières de remplissage sont éteintes, et enregistrer immédiatement l'intensité lorsque les lumières de remplissage sont allumées ; puis calculer la différence entre ces deux valeurs d'intensité. Cette différence peut être déterminée comme l'intensité de la lumière de remplissage réfléchie par l'objet. Dans l'algorithme, l'intensité de la lumière ambiante est considérée comme presque inchangée en un très court laps de temps.
Pour les erreurs de détection, vous pouvez également utiliser un algorithme pour classer plusieurs valeurs proches comme une couleur.
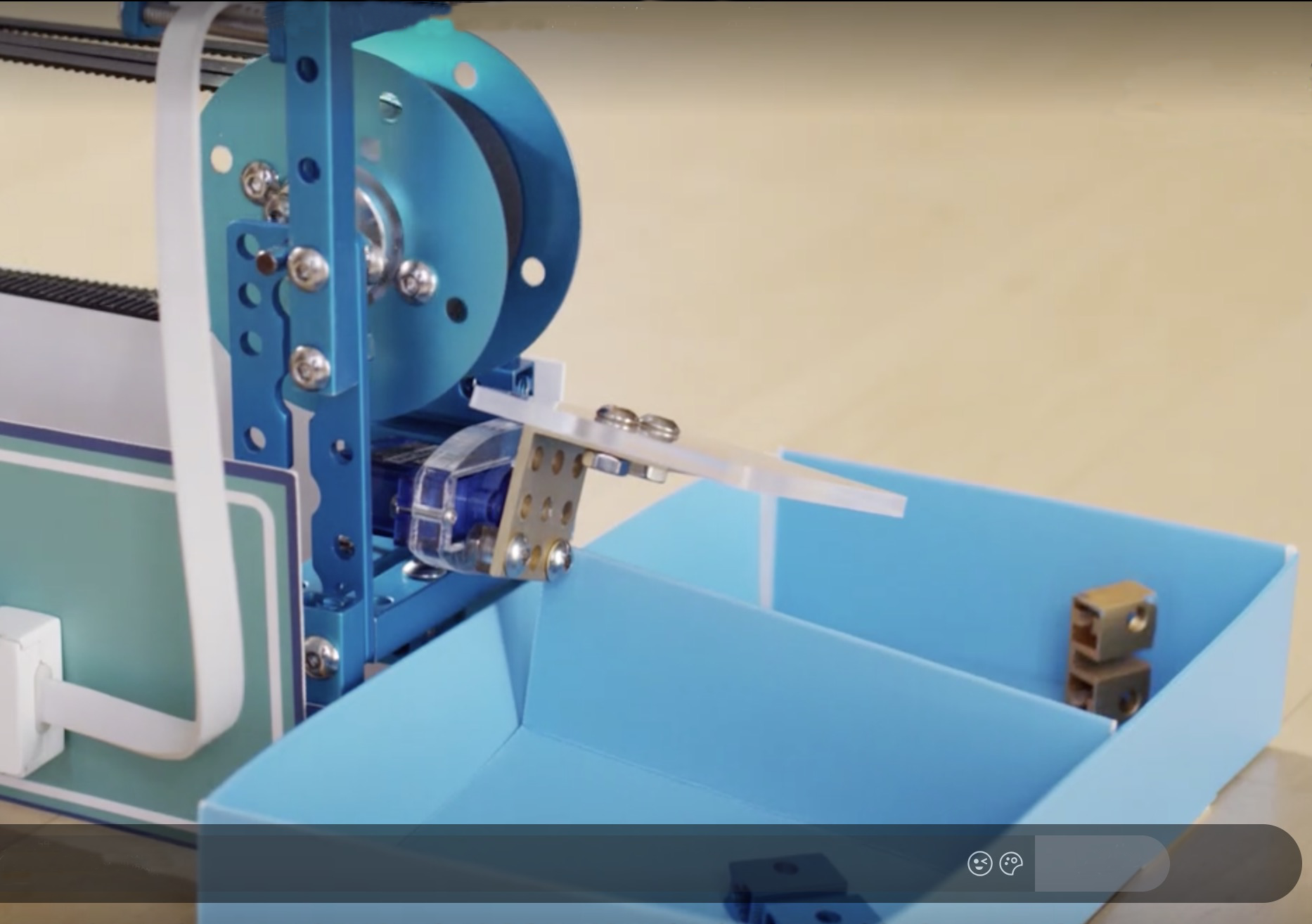
Exemple de la vie réelle
- Les capteurs de couleur sont utilisés pour concevoir une ligne d'assemblage pour le tri des pièces.
Spécifications
- Plage de détection : 5–15 (mm) de l'objet à détecter
- Courant de fonctionnement : 70 mA