Program CyberPi with a Third-party Python Editor
Ce qui suit est un guide étape par étape pour les utilisateurs sous Windows. Les utilisateurs de Mac peuvent l'utiliser comme référence.
Démarrage rapide pour les utilisateurs qui ont déjà un environnement Python et un éditeur tiers installés :
- Passez à l'étape 3, ou installez les bibliothèques pyserial et cyberpi avec les commandes suivantes :
pip install pyserialpip install cyberpi
1. Configuration d'un environnement Python
- Allez sur Python.org pour sélectionner et télécharger Python pour votre système d'exploitation.
- Python pour Windows : Téléchargement
- Python pour Mac OS : Téléchargement
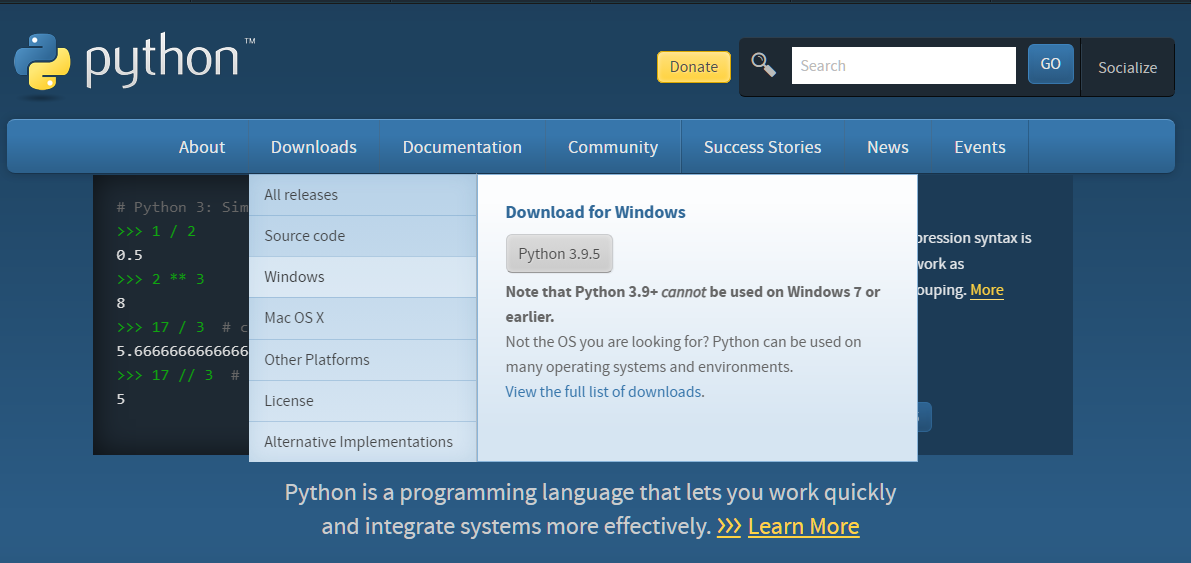
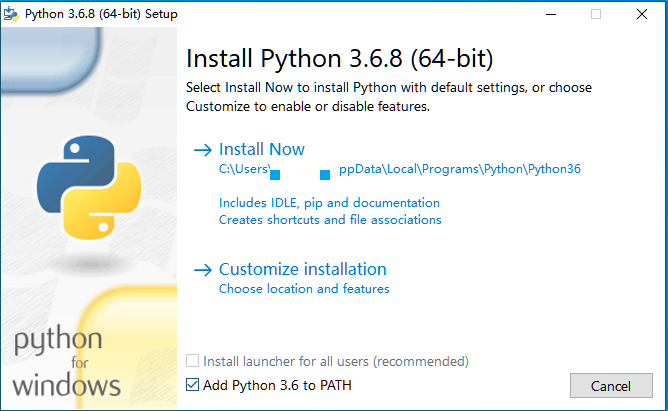
- Cliquez sur la version sélectionnée pour installer, n'oubliez pas de cocher Ajouter Python 3.6 au PATH, puis cliquez sur Installer maintenant.
- Vous pouvez également cliquer sur Personnaliser l'installation pour installer l'environnement Python dans un répertoire spécifié.
2. Installation et configuration de l'éditeur Python tiers (Visual Studio Code à titre d'exemple)
Remarque : Les étapes peuvent varier en fonction de l'éditeur que vous utilisez. Il est également recommandé de configurer l'environnement Python installé dans l'éditeur.
- Téléchargez VS Code selon votre système d'exploitation. Télécharger VS Code
- Cliquez sur le package d'installation téléchargé pour l'installer. (Suivez simplement les invites pour installer)
- Cliquez sur l'icône de VS Code sur le bureau pour exécuter le programme.
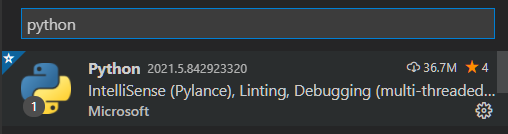
- Sur le côté gauche de l'interface du logiciel, trouvez l'icône dans le rectangle rouge comme indiqué ci-dessous et cliquez dessus.

- Recherchez l'extension Python et installez-la. Notez que l'éditeur est Microsoft.
- Configurez l'environnement Python précédemment installé dans l'éditeur VS Code.
- Créez un nouveau dossier et un fichier .py et vous pouvez écrire des programmes Python de base.
3. Préparation pour programmer CyberPi avec l'éditeur tiers
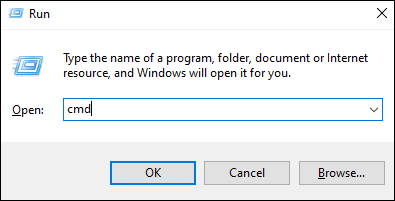
- Sous le système d'exploitation Windows, appuyez sur Windows + R sur le clavier, tapez **CMD **et appuyez sur Entrée, puis la fenêtre CMD s'affichera.
-
Installez la bibliothèque pyserial, qui assure que CyberPi est connecté à l'éditeur tiers via un câble USB ou un dongle Bluetooth.
Tapez `pip install pyserial` dans la fenêtre CMD et appuyez sur **Entrée**, attendez que la bibliothèque soit installée.
-
Installez la bibliothèque cyberpi, qui est une bibliothèque Python utilisée pour la programmation en ligne de CyberPi.
Tapez `pip install cyberpi` dans la fenêtre CMD et appuyez sur **Entrée**, attendez que la bibliothèque soit installée. Vous pouvez vous référer à la [Documentation de l'API Python pour CyberPi](https://www.yuque.com/makeblock-help-center-en/mcode/cyberpi-api).
- Après l'installation, vous pouvez écrire des programmes dans l'éditeur configuré avec l'environnement Python.
4. Remarque
L'éditeur tiers prend actuellement uniquement en charge la programmation en ligne pour CyberPi.
5. Exemples de programmes
Souris CyberPi
Nécessite l'installation du module pynput. Référez-vous à l'étape ci-dessus pip install pynput
""""
Nom: Souris Cyber Pi
Introduction:
Utilisez le module gyroscope, les boutons de Cyber Pi, et la fonction de contrôle de la souris du module pynput, pour convertir Cyber Pi en une souris.
Vous pouvez également utiliser le module Bluetooth pour convertir Cyber Pi en une souris sans fil.
""""
from pynput.mouse import Button, Controller
import cyberpi
import time
mouse = Controller()
while True:
if cyberpi.is_tiltback():
mouse.move(-3, 0)
print(mouse.position)
if cyberpi.is_tiltforward():
mouse.move(3, 0)
if cyberpi.is_tiltleft():
mouse.move(0, -3)
if cyberpi.is_tiltright():
mouse.move(0, 3)
if cyberpi.controller.is_press("b"):
mouse.press(Button.left)
mouse.release(Button.left)
mouse.press(Button.left)
mouse.release(Button.left)
if cyberpi.controller.is_press("a"):
mouse.press(Button.right)
mouse.release(Button.right)
time.sleep(0.01)
CyberPi voice typer
""""
Nom: 074 Cyber Pi dactylo vocal
Matériel: Cyber Pi
Introduction:
Utilisez la fonction de reconnaissance vocale de Cyber Pi, et la fonction de contrôle de clavier du module pynput.
Le résultat de la reconnaissance vocale sera imprimé dans un fichier via pynput.
Ce programme prend actuellement uniquement en charge l'anglais.
""""
import cyberpi
from pynput.keyboard import Key, Controller
import time
keyboard = Controller()
cyberpi.console.clear()
cyberpi.led.on(0, 0, 0)
cyberpi.set_recognition_url()
cyberpi.cloud.setkey("Entrez le code d'autorisation du service cloud") # Vous pouvez l'obtenir via votre compte mBlock
cyberpi.wifi.connect("Nom du WIFI", "Mot de passe du WIFI")
while not cyberpi.wifi.is_connect():
pass
cyberpi.led.on(0,0,255)
cyberpi.console.println("WIFI connecté")
cyberpi.console.println("--------------")
cyberpi.console.println("Appuyez sur le bouton A pour démarrer la reconnaissance vocale")
while True:
if cyberpi.controller.is_press('a'):
keyboard.press(Key.space)
cyberpi.console.clear()
cyberpi.led.on(100, 0, 0)
cyberpi.console.println("Démarrer la reconnaissance vocale")
cyberpi.audio.play("switch")
cyberpi.console.println("--------------")
cyberpi.cloud.listen("anglais", 2)
cyberpi.led.on(0, 0, 0)
say = cyberpi.cloud.listen_result()
cyberpi.console.println(say)
cyberpi.console.println("--------------")
for i in say:
if i == '':
keyboard.press(' ')
else:
keyboard.press(str(i))
time.sleep(0.03)
Histogramme de volume Matplotlib
import cyberpi
import time
from matplotlib import pyplot as plt
plt.rcParams['font.sans-serif'] = ['Microsoft YaHei']
plt.ion()
while True:
loud = cyberpi.get_loudness()
plt.clf()
plt.xlabel("Nom des données")
plt.ylabel("Lectures de volume")
y_locator = plt.MultipleLocator(5)
ax=plt.gca()
ax.yaxis.set_major_locator(y_locator)
plt.ylim(0,100)
plt.bar('Volume', loud, align='center',label=f'Température{loud}')
plt.title('Lectures du capteur de son Cyber Pi')
plt.legend()
plt.show()
plt.pause(0.01)
Matplotlib multi-chart display
import cyberpi
import time
from matplotlib import pyplot as plt
plt.rcParams['font.sans-serif'] = ['Microsoft YaHei']
plt.ion()
while True:
loud = cyberpi.get_loudness()
plt.clf()
plt.xlabel("Nom des données")
plt.ylabel("Lectures de volume")
y_locator = plt.MultipleLocator(5)
ax=plt.gca()
ax.yaxis.set_major_locator(y_locator)
plt.ylim(0,100)
plt.bar('Volume', loud, align='center',label=f'Température{loud}')
plt.title('Lectures du capteur de son Cyber Pi')
plt.legend()
plt.show()
plt.pause(0.01)